Simultaneous Localization And Mapping : Simultaneous Localization and Mapping (SLAM) - YouTube - • (mapping) robot need to map the positions of objects that it encounters in its environment (robot position known).
Simultaneous Localization And Mapping : Simultaneous Localization and Mapping (SLAM) - YouTube - • (mapping) robot need to map the positions of objects that it encounters in its environment (robot position known).. Simultaneous localisation and mapping — das slam problem (simultaneous localization and mapping, engl.: Part i the essential algorithms , (2006) ( pdf ). A map is needed for localization and a pose estimate is needed for mapping. In robotic mapping, simultaneous localization and mapping (slam) is the computational problem of constructing or updating a map of an unknown environment while simultaneously keeping track of an agent's location within it. Abstract—this paper implements simultaneous localization and mapping (slam) technique to construct a map of a given environment.
Visual slam (simultaneous localization and mapping) refers to the problem of using images, as the only source of external information, in order to establish the position of a robot, a vehicle, or a moving camera in an environment, and at the same time, construct a representation of the explored zone. This is why localisation and mapping has to happen simultaneously. It lets them know their position by aligning the sensor data they collect with whatever sensor data they've already. Part ii state of the art , (2006) ( pdf ). In robotic mapping, simultaneous localization and mapping (slam) is the computational problem of constructing or updating a map of an unknown…
Visualization of simultaneous localization and mapping ... from image.slidesharecdn.com Part ii state of the art , (2006) ( pdf ). Amol borkar, senior product manager at cadence, talks with semiconductor engineering about how to track the movement of an object in a scene and how to. A map is needed for localization and a pose estimate is needed for mapping. Simultaneous localization and mapping—a discussion. Most robots today would fail to work at all, and the reason is because of a challenge in robotics called simultaneous localization and mapping (slam). The robot or vehicle plots a course in an area, but at the same time, it also has to figure. Wolfram burgard, cyrill stachniss, kai arras, maren bennewitz. Home > auto, security & pervasive computing > understanding slam (simultaneous localization and mapping).
On the structure and solution of the simultaneous localisation and map building problem.
Simultaneous localisation and mapping (slam) is a series of complex computations and algorithms which use sensor data to construct a map of an unknown environment a set of algorithms working to solve the simultaneous localization and mapping problem. Home > auto, security & pervasive computing > understanding slam (simultaneous localization and mapping). Simultaneous localization and mapping (slam) is a core capability required for a robot to explore and understand its environment. You can read more about it here : Simultaneous localization and mapping (slam) is the traditional formulation of this problem where a robot with imperfect sensors traverses an unknown environment with a set of landmarks. Simultane lokalisierung und kartenerstellung ) ist ein problem, bei dem ein mobiler roboter gleichzeitig eine karte seiner umgebung erstellen und seine pose innerhalb dieser karte… … Proceedings of the ijcai workshop on reasoning with uncertainty in newman, p.: Slam denotes simultaneous localization and mapping, form the word, slam usually does two main functions, localization which is detecting where exactly or roughly (depending on the accuracy of the algorithm) is the vehicle in an indoor/outdoor area, while mapping is building a 2d/3d model of. And what if it didn't have any access to external data like a previously constructed map or gps? • (slam) robot simultaneously maps. Amol borkar, senior product manager for ai and computer vision at cadence, talks with semiconductor engineering about mapping and tracking the movement of an object in a scene. Simultaneous localization and mapping (slam) is an extremely important algorithm in the field of robotics. • (localization) robot needs to estimate its location with respects to objects in its environment (map provided).
On the structure and solution of the simultaneous localisation and map building problem. Home > auto, security & pervasive computing > understanding slam (simultaneous localization and mapping). §§ a map is needed for localization and §§ a good pose estimate is needed for mapping. Simultaneous localization and mapping (slam) is the task of constructing or updating a map of an unknown environment while simultaneously keeping track of an agent's location within it. Simultaneous localization and mapping, or slam for short, is the process of creating a map using a robot or unmanned vehicle that navigates that slam is technique behind robot mapping or robotic cartography.
PDF Simultaneous Localisation and Mapping ( SLAM ... from d3i71xaburhd42.cloudfront.net Proceedings of the ijcai workshop on reasoning with uncertainty in newman, p.: • (localization) robot needs to estimate its location with respects to objects in its environment (map provided). Simultaneous localization and mapping (slam) is the computational problem of constructing or updating a map of an unknown environment while simultaneously keeping track of an agent's location within it. Simultaneous localization and mapping (slam) is the task of constructing or updating a map of an unknown environment while simultaneously keeping track of an agent's location within it. You can read more about it here : Instead they rely on what's known as simultaneous localization and mapping, or slam, to discover and map their surroundings. Using slam, robots build their own maps as they go. Slam denotes simultaneous localization and mapping, form the word, slam usually does two main functions, localization which is detecting where exactly or roughly (depending on the accuracy of the algorithm) is the vehicle in an indoor/outdoor area, while mapping is building a 2d/3d model of.
§§ a map is needed for localization and §§ a good pose estimate is needed for mapping.
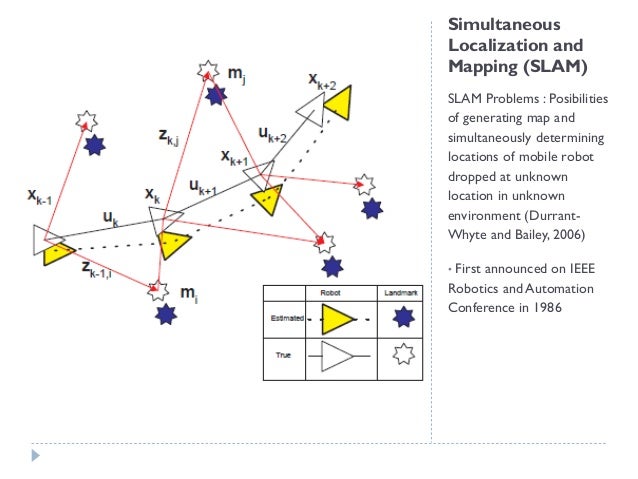
Amol borkar, senior product manager for ai and computer vision at cadence, talks with semiconductor engineering about mapping and tracking the movement of an object in a scene. Simultaneous localization and mapping—a discussion. Instead they rely on what's known as simultaneous localization and mapping, or slam, to discover and map their surroundings. Abstract—this paper implements simultaneous localization and mapping (slam) technique to construct a map of a given environment. The above is the core idea behind simultaneous localisation and mapping, which is used very widely in any kind of robotics applications that require the robot to move around a new environment. As the robot moves, it perceives the landmarks through its sensors and fuses these noisy measurements in order. We have developed a large scale slam system capable of building maps of industrial and urban facilities using lidar. Most robots today would fail to work at all, and the reason is because of a challenge in robotics called simultaneous localization and mapping (slam). Simultaneous localization and mapping (slam) is an extremely important algorithm in the field of robotics. Simultaneous localization and mapping, or slam for short, is the process of creating a map using a robot or unmanned vehicle that navigates that slam is technique behind robot mapping or robotic cartography. Simultaneous localisation and mapping (slam) is a series of complex computations and algorithms which use sensor data to construct a map of an unknown environment a set of algorithms working to solve the simultaneous localization and mapping problem. In robotic mapping, simultaneous localization and mapping (slam) is the computational problem of constructing or updating a map of an unknown environment while simultaneously keeping track of an agent's location within it. • (localization) robot needs to estimate its location with respects to objects in its environment (map provided).
• (slam) robot simultaneously maps. We have developed a large scale slam system capable of building maps of industrial and urban facilities using lidar. Simultaneous localisation and mapping (slam) is a series of complex computations and algorithms which use sensor data to construct a map of an unknown environment a set of algorithms working to solve the simultaneous localization and mapping problem. In robotic mapping, simultaneous localization and mapping (slam) is the computational problem of constructing or updating a map of an unknown environment while simultaneously keeping track of an agent's location within it. A map is needed for localization and a pose estimate is needed for mapping.
Monocular simultaneous localization and generalized object ... from image.slidesharecdn.com Inferring location given a map. Simultaneous localization and mapping (slam) is an extremely important algorithm in the field of robotics. Abstract—this paper implements simultaneous localization and mapping (slam) technique to construct a map of a given environment. • (slam) robot simultaneously maps. Slam can be implemented in many ways. You can read more about it here : Simultaneous localization and mapping (slam) is the task of constructing or updating a map of an unknown environment while simultaneously keeping track of an agent's location within it. The above is the core idea behind simultaneous localisation and mapping, which is used very widely in any kind of robotics applications that require the robot to move around a new environment.
The robot or vehicle plots a course in an area, but at the same time, it also has to figure.
Part i the essential algorithms , (2006) ( pdf ). Home > auto, security & pervasive computing > understanding slam (simultaneous localization and mapping). Instead they rely on what's known as simultaneous localization and mapping, or slam, to discover and map their surroundings. Using slam, robots build their own maps as they go. Abstract—this paper implements simultaneous localization and mapping (slam) technique to construct a map of a given environment. Simultaneous localization and mapping (slam) is the computational problem of constructing or updating a map of an unknown environment while simultaneously keeping track of an agent's location within it. On the structure and solution of the simultaneous localisation and map building problem. Simultaneous localization and mapping, or slam for short, is the process of creating a map using a robot or unmanned vehicle that navigates that slam is technique behind robot mapping or robotic cartography. Wolfram burgard, cyrill stachniss, kai arras, maren bennewitz. This is why localisation and mapping has to happen simultaneously. As the robot moves, it perceives the landmarks through its sensors and fuses these noisy measurements in order. Proceedings of the ijcai workshop on reasoning with uncertainty in newman, p.: Simultaneous localization and mapping (slam) is an extremely important algorithm in the field of robotics.
Related : Simultaneous Localization And Mapping : Simultaneous Localization and Mapping (SLAM) - YouTube - • (mapping) robot need to map the positions of objects that it encounters in its environment (robot position known)..